Research
紹介記事
先端研研究者紹介(フロントランナー)
先端研広報室に取材・作成してもらいました。人工衛星等の人工システムのデータ駆動形健全性監視など、当研究室で取り組んでいる研究内容について「ざっくり」と紹介しています。
先端学際工学専攻「研究室紹介」
同じく、先端研広報室による取材・作成です。よりコンパクトに研究内容と研究室の「雰囲気」を紹介しています。
研究テーマ
ここで紹介しているテーマのほかにも、幅広く機械学習・人工知能に関連する研究を行っています。自由な発想での研究提案を歓迎します。
データ駆動形健全性監視
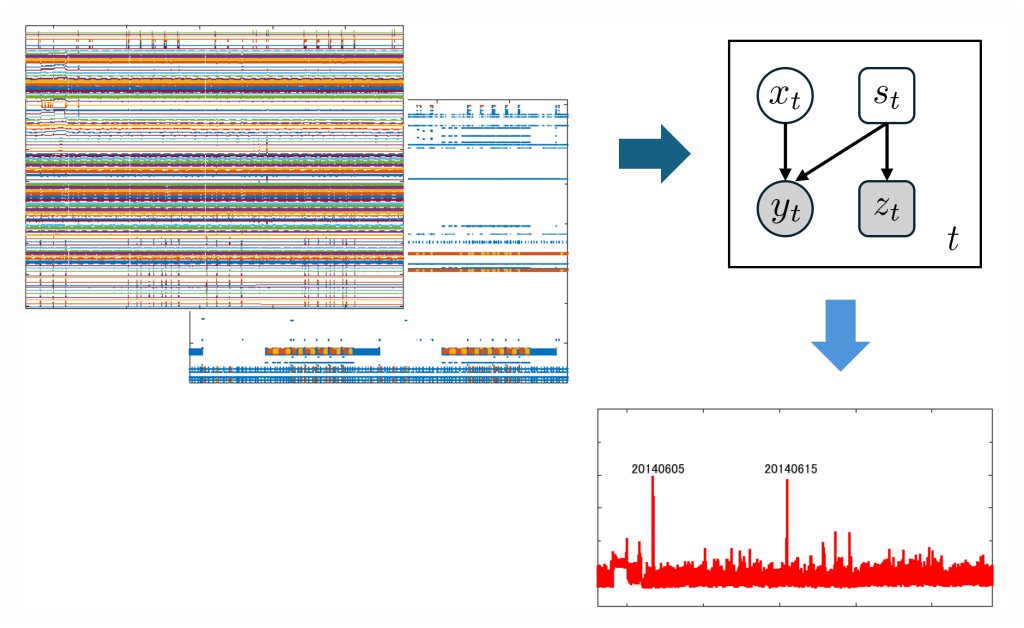
人工衛星、産業プラント、自動車などの人工システムへの適用を念頭に、データから異常検知や余寿命予測を行う方法を研究しています。
確率推論とその応用
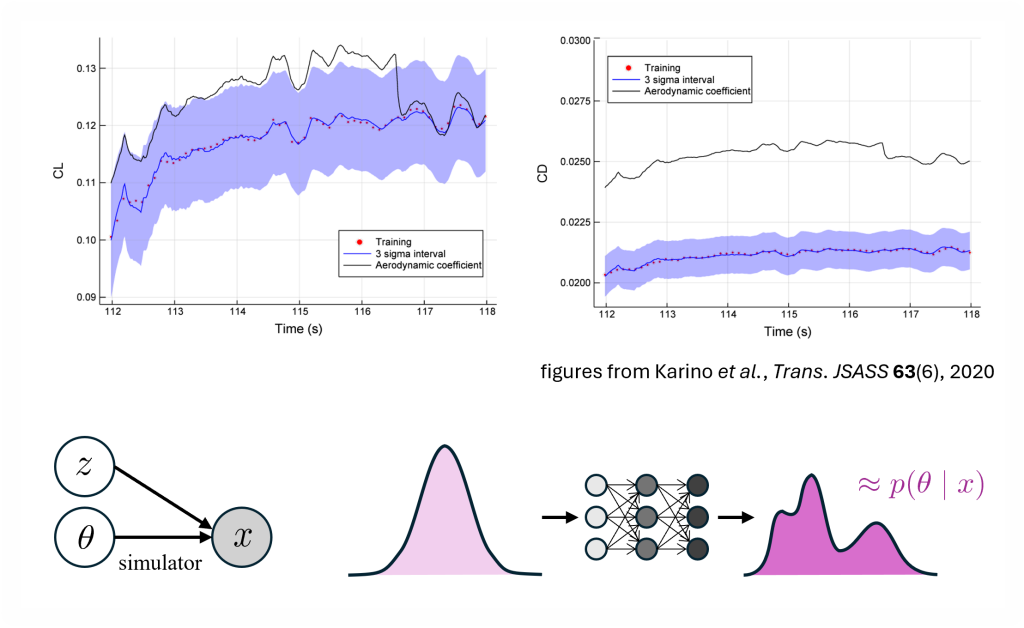
不確かさを考慮してモデルパラメタなどをデータから推論する方法や、航空宇宙関連をはじめとする分野での応用を研究しています。
移動ロボットの経路計画・制御・強化学習
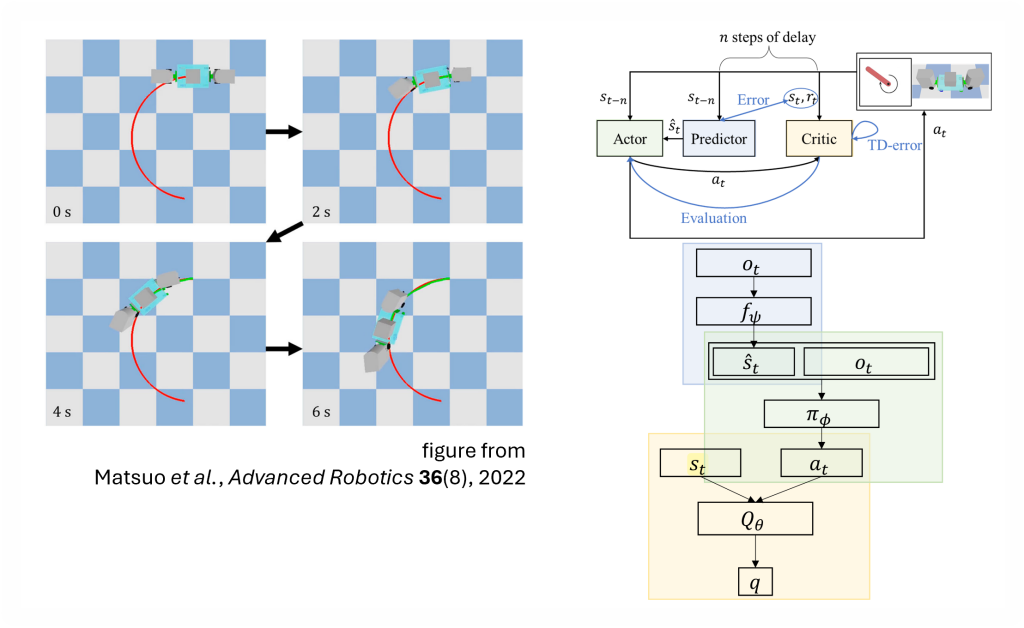
地上や空中を移動するロボットの動くべき経路を計算したり、それに沿った制御を行ったりするための方法を研究しています。また、強化学習によってロボットを目的通りに移動させる方法も研究しています。
知識に基づく機械学習、科学モデルとの融合

データ駆動型の方法である機械学習と運動方程式などの理論に基づく数理モデルを組み合わせてモデルを得る方法を研究しています。
動的システム(力学系)の学習と解析
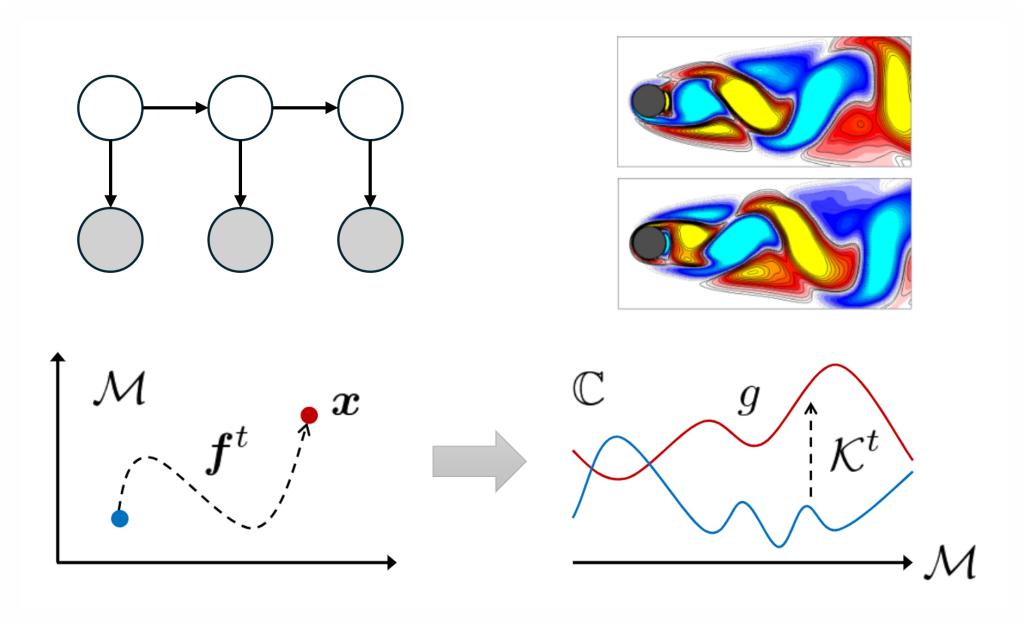
微分方程式や差分方程式などで表されるダイナミクスを同定・学習したり解析したりする方法を研究しています。制御で用いられる状態空間モデルや、作用素論的力学系論に基づく手法を中心に扱っています。
小惑星形状推定と探査機画像航法
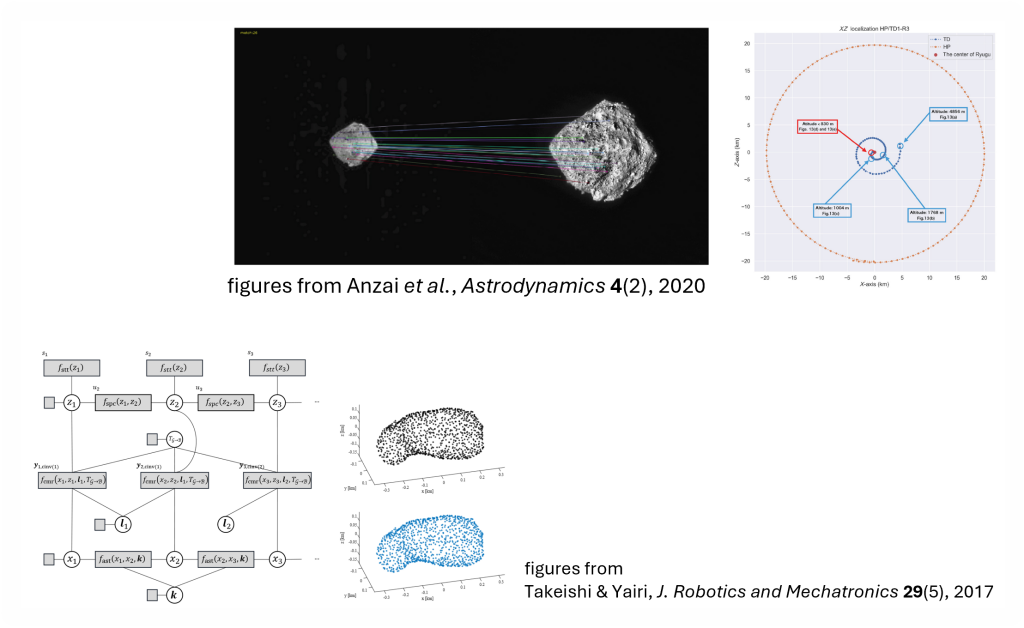
小惑星探査機のミッション遂行のために画像から小惑星の形状を推定したり、探査機自身の位置や姿勢を推定したりする方法を研究しています。